智駕方案降本成焦點,毫米波雷達江湖往何處卷?
如果說,T型車體現了亨利·福特的畢生目標——讓普通人也能開得上車。那么如今,毫米波雷達廠商也將要實現其在智駕領域的目標——讓人人都能用得上智能駕駛。
摘要
從2016年開始的智能駕駛創業熱,RobotTaxi如日中天,到目前面臨行業寒冬,裁員、倒閉、市值暴跌等屢見不鮮,代表性事件是谷歌旗下的Waymo正啟動裁員計劃,“自動駕駛第一股”圖森未來(TSP,NASDAQ)其上市至今股價跌去98%。
確實,目前以RoboTaxi為代表的自動駕駛市場發展的并不盡如人意。或許答案主要出在價格方面:高階自動駕駛系統的價格高昂到超過了其所能提供的實際駕駛輔助或自動駕駛性能,只會成為馬斯克眼中的“闌尾”。
產業界和資本界發現,無論智能駕駛的故事多么性感和動聽,性能和成本才應該是當下共同的目標,尤其在今年OEM降價潮的背景下。
性能提升:4D成像毫米波雷達脫穎而出
受到激光雷達成本太高的限制,4D成像毫米波雷達(以下簡稱"4D成像雷達")今年一躍成為智能駕駛領域的“香餑餑”。
尤其是當馬斯克官宣HW 4.0平臺硬件上加入4D成像雷達之后,一石激起千層浪。不少中高端汽車制造商開始將精度更高的4D成像毫米波雷達納入其感知方案,其中包括比亞迪這樣的大廠。
在討論毫米波雷達的性能優點之前,我們先了解一下它的工作原理,毫米波雷達是通過向目標發送電磁波,然后接收反射回來的電磁波,根據反射電磁波的時間差,計算出物體的距離。通過比較發送和接收電磁波的頻率差,還可以計算出物體的速度。這是基本的2D毫米波雷達,能夠測量出物體的【距離】和【速度】。
3D毫米波雷達在2D的基礎上增加了方位角的測量,能夠知道物體在【水平面】上的方向。而4D成像雷達則在3D的基礎上增加了【高度】的測量,因此能夠得到物體的完整三維信息,以及物體的速度,這四個維度數據共同構成了4D。
可以看出,對于4D成像雷達來說,在性能方面多了以下幾個優勢:
首先是高精度:在增加了對高度的測量之后,4D成像雷達能夠更準確地探測物體,減少誤判和遺漏,從而提高自動駕駛的安全性。
其次是高分辨率:在分辨率上,4D成像雷達已經可以逼近16~32線的激光雷達,能夠更細致地描繪出環境中的物體,更適合與深度學習框架結合。
在強抗干擾能力和大探測范圍上,4D成像雷達能力也相當出色。這主要是因為毫米波雷達不受天氣和光照的影響,這使得它在惡劣天氣和夜晚都能正常工作,確保自動駕駛系統的穩定性;而且不受物體顏色和材質的影響,測距更長,穿透性也更強。
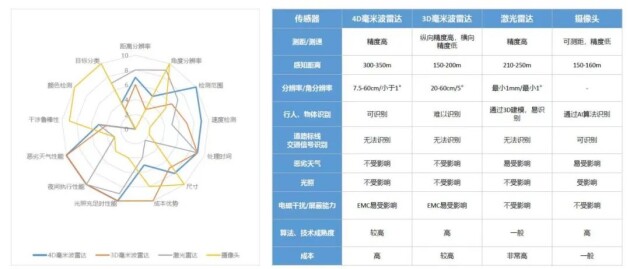
圖片來源:IDTechEX Research、網絡公開渠道
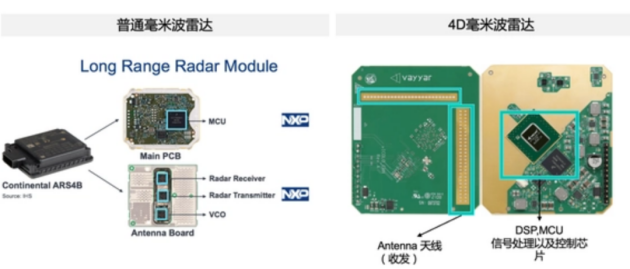
4D 成像雷達的底層原理和普通毫米波雷達底層技術類似,典型的雷達系統使用一組天線元件,每個元件都有一個寬波束。然后,他們可以通過稱為數字波束形成的過程以數字方式組合這些以創建窄波束陣列,從而提高最終圖像的分辨率。
3D 和 4D 雷達之間的區別在于這些天線元件的排列方式。3D 雷達系統具有水平排列的天線,而 4D 雷達具有水平和垂直排列的元件。
4D毫米波雷達實現點云功能共有三種主流技術:
第一種是MIMO芯片級聯。傳統毫米波雷達芯片供應商多采用基于79GHz標準雷達芯片的多級聯方式,從而提升功率和角分辨率。
第二種:通過將多發多收天線集中在一個芯片中,通過研發芯片組來實現上述功能。這種方案其實與芯片級聯類似,但是將天線,MMIC等進一步集成至芯片級別,可以將雷達進一步小型化。
第三種:軟件算法賦能。軟件算法可直接作用在MIMO環節,虛擬出更多信號通道。實現方式可簡單概括為:調頻、調相、調幅。
總結來說,4D成像毫米波雷達增加了天線數量與密度,使得角度、速度分辨率均有優化,且輸出的點云圖像更加致密,能夠刻畫更為真實的環境圖像,可以有效解析測得目標的輪廓、行為和類別,適應更加復雜的道路,識別更多小物體,有效實現對被遮擋部分的物體及靜止或橫向物體的監測。
成本下降:助力高階智能駕駛普及
隨著新能源汽車智能駕駛滲透率不斷提升,在輔助駕駛方面已難以拉開較大技術差距,城市NOA(Navigate on Autopilot,高階智能駕駛輔助)成為OEM廠商競爭的焦點,如小鵬、蔚來、哪吒、智己紛紛推出各自的NOA產品。因此,2023年被業內稱為城市NOA的落地元年。
2022年11 月 2 日,工信部、公安部印發《關于開展智能網聯汽車準入和通行試點工作的通知(征求意見稿)》,這是中央首次針對 L3/L4 級別自動駕駛推出管理辦法,政策也在推動高階智能駕駛落地。
根據《麥肯錫中國汽車消費者洞察》報告顯示,目前消費者對于高速道路等特定場景下的自動駕駛功能有著較高需求。用戶、產品、政策多個維度都在驅動高階智能駕駛落地。
4D成像雷達既保留了傳統毫米波雷達的性能特點——具備速度感知能力和全天候全天時特性且成本低,也能憑借足夠豐富的信息量去和可見光攝像頭、激光雷達等傳感器形成融合,助力高階智能駕駛普及。
相對于激光雷達,4D成像雷達角度分辨率已經達到1-2度,基本達到8-16線激光雷達的水平,甚至有些達到32線水平。4D成像雷達目前價格200美金左右,激光雷達高達500-1000美金。隨著技術迭代降本、規模效應降本,4D成像毫米波雷達的價格可望降至數百元,有巨大的成本優勢,將對中、低線束激光雷達實現替代。
相對于3D毫米波雷達,盡管價格方面4D成像雷達比3D毫米波雷達高2-3倍左右,但4D成像雷達具有多維度的數據、高分辨率、點云圖的高性能優勢,其海量信號級信息的釋放,提高了輸出信息的完整性,有利于實現多傳感器的前融合,更適合與人工智能深度學習框架結合。
因此,在廠商技術迭代和政策的推動下,高階智能駕駛將加快普及,兼具性能和成本優勢的4D成像雷達將更快實現規模化量產上車。而根據Yole預測,4D雷達未來的成本目標將是100美元。這意味著,即使是低端車型也很快就能用上L2+級別的智能駕駛解決方案。
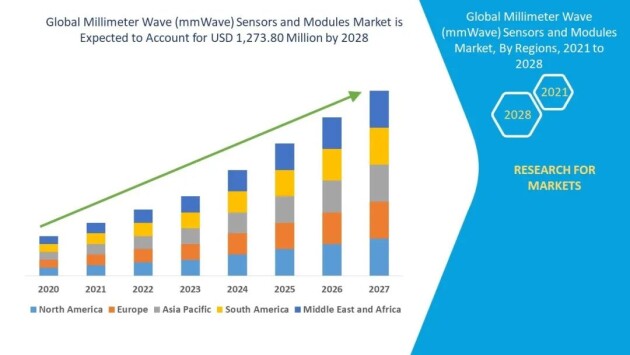
圖片來源:Data Bridge Market Research
1908年,亨利·福特推出了舉世聞名的T型車,一舉開創了汽車時代和福特公司的新紀元。實際上,T型車的誕生不僅僅是一種車型或者設計的創新,更是汽車生產方式乃至大工業生產方式上具有劃時代意義的創新。
如果說,T型車體現了亨利·福特的畢生目標——讓普通人也能開得上車。那么如今,毫米波雷達廠商也將要實現其在智駕領域的目標——讓人人都能用得上智能駕駛。
機會:本土供應鏈崛起,進口替代與海外市場存在長期機遇
根據Yelo 的預測未來全球4D毫米波雷達的市場在2027年達35億美元。眼看數百億級的市場近在眼前,資本也對毫米波雷達廠商屢屢拋出橄欖枝,今年以來就有數家毫米波雷達新秀拿到融資:
比如蔚來資本、北京小米智造基金在今年四月份投資了4D成像雷達初創企業賽恩領動;同樣在四月,早期研發4D高精度成像雷達的企業牧野微電子,也宣布完成億元Pre-A輪融資。
早在2019年,全球毫米波雷達領跑者木牛科技率先將4D雷達前裝給全球頭部機械車輛制造商Bobcat,并獲得Bobcat對美國子公司Ainstein戰略投資。木牛科技從此打開全球智駕市場的商業化局面,開啟了國產雷達替代國際大廠的征程。今年2月,木牛科技再次宣布完成C輪數億元融資,并拿到多家頭部車企的前裝車型定點。
4D成像雷達賽道迎來強勁風口,但這塊的技術門檻非常高,不是短期就能做好的。它需要多年開發經驗來部署復雜的射頻排布和疊層、高速車規級數字信號鏈路、多芯片集成排布堆疊、天線布局與優化、射頻降噪處理技術、抗干擾設計,以及大計算量的并行軟件設計等。
4D成像雷達量產要求是小型化、輕量化、低成本,這還需要可靠的機械結構、靈活的硬件設計,同時需要保證垂直方向角度分辨率、遠近距離雙區域模式探測,以及復雜而全面的軟件算法設計。
對于雷達廠商來說,機會往往與挑戰并存,競爭如今也進入到了“白熱化”階段。
競爭聚焦點來自以下幾個方面:
1. 技術方案的選擇:在整機/解決方案供應商方面,目前傳統Tier1普遍采用級聯技術,在4D產品量產方面走在前列,比如博世、大陸、海拉等;新進入廠商可以依托專用芯片組和虛擬孔徑方案實現換道超車,比如Arbe產品通道數具備較強競爭力。
盡管集成芯片方案能通過將多發多收天線集成在一顆芯片中,以降低雷達功耗,但目前業內之所以廣泛應用多級聯方案,是因為該方案以成熟的標準雷達芯片為基礎,產品上市快,安全性也更能得到保證。
2. 體現性價比的方案搭配能力:毫米波雷達的差異化不只是在硬件上,其實真正在于它的模擬和數字算法的整套體系長期積累和成熟化的迭代上。智駕系統是通過傳感器組合完成對周圍環境的感知,通過多傳感器數據融合后進而實現規劃、控制決策,因此智駕系統應該使用多傳感器進行組合,實現不同的方案搭配。簡單來說,就是“總有一款適合你”。
以木牛科技為例,木牛可針對L2級以上ADAS系統提供兩套5R方案,其中高性價比版是前向雷達x1+角雷達x4;而高階性能版是4D成像雷達x1+角雷達x4。無論哪一種方案,均已達到業內最佳性能,都能提供點云層級、目標層級、功能層級的信號輸出,幫助客戶和主機廠快速實現落地,獲得更好的感知質量。
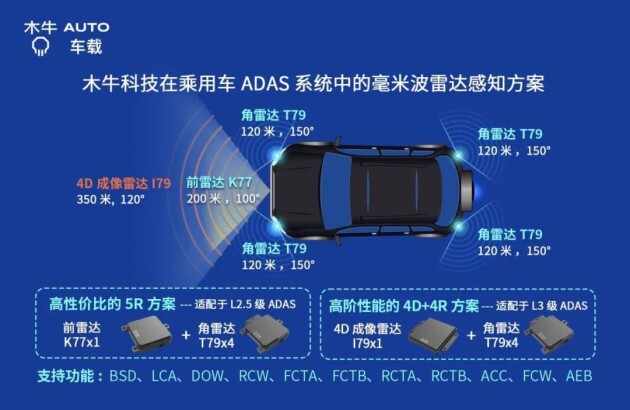
圖片來源:木牛科技
3. 對產業鏈更深刻的理解能力:對于4D成像雷達廠商來說,現在“PK”已經走到了量產階段,主機廠也將更看重廠商的專業性和資源投入。毫米波雷達上車需在探測精度、頻率、發射功率等層面符合相關車規驗證標準。車規級芯片在設計、開發、生產和測試階段要求更高,開發周期更長,這就要求雷達廠商需與上游芯片廠商有緊密的合作關系。毫米波雷達,這場深度融合了技術、資本、市場和全球化視野的較量已經悄然展開。
軒元資本認為,車載毫米波雷達領域本土廠商不僅存在進口替代的機會,而且在4D成像毫米波雷達新的技術路線存在彎道超車的機會,有望拿下海外市場。具備技術實力、市場洞察力、供應鏈管理能力以及國際化水平的公司最終將會勝出。
參考文獻:
Towards ADAS to Imaging radar for automotive market and technology trends-YELO。
4D 毫米波雷達:智駕普及的新路徑。來源:華泰證券。
車載毫米波雷達及芯片新趨勢研究。來源:國泰君安證券研究。