【典型案例】多光譜遙感技術在廣域水體中的應用集錦
廣域水體監測作為生態環保、水產養殖、海洋管理等相關部門的重點工作之一,在保證一定分辨率情況下,能否對大面積純水體目標進行完整拼接是開展廣域水體監測工作的重要前提。
水體作為典型弱紋理場景,傳統的二維建圖方法難以實現廣域水體的完整成圖,尤其對于單張影像中全部為水體的場景,正常的拼接流程會引起拼接影像空洞、扭曲等問題。長光禹辰針對廣域水體監測需求,基于Yusense Map軟件,使用局部空三+DOM填充方式實現“湖泊水庫”、“大尺度河道”、“入海口”及“海岸線”4種廣域水體的整體拼接,以滿足用戶對大面積純水體的監測需求。
01 湖泊、水庫場景
湖泊、水庫等封閉區域水體是廣域水體的常見場景,尤其對于景觀湖、蓄水池、水源地等對水環境要求較高的區域,定期監測有無污染情況是相關管理部門的重點工作內容之一。

M300 RTK+MS600 Pro+H20
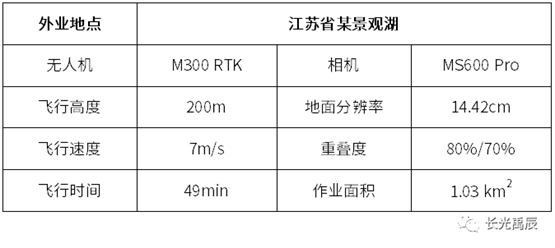
本案例選取江蘇省某湖泊作為實驗目標,使用M300 RTK無人機搭載長光禹辰自主研發的6通道多光譜相機MS600 Pro,獲取了完整湖泊與岸線影像,具體外業情況見下表:
使用Yusense Map軟件分步執行波段配準、二維建圖*、反射率校正,得到最終具有反射率意義的拼接影像,其中水面部分已進行DOM填充,實現了完整的正射建圖,同時使用Yusense Map Plus查看水體光譜特征曲線,符合水體光譜反射特征。

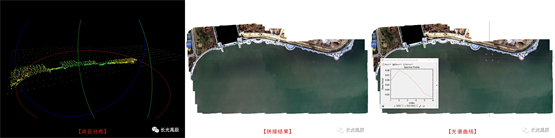
點云分布&拼接結果&光譜曲線
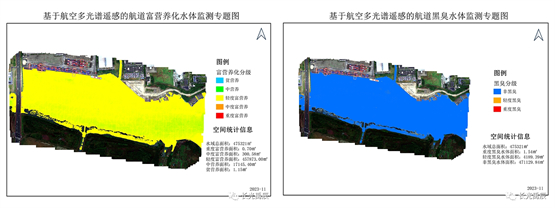
使用Yusense Map Plus分別進行富營養化與黑臭水分析,可以看出本案例所選湖泊整體呈現輕度富營養化情況,局部出現中度富營養化情況,與目視評估水色以及光譜曲線中紅邊波段反射較高的情況匹配程度較高,同時無黑臭水體污染,整體表明使用DOM填充方法對光譜屬性影響較小,可以滿足水體監測需求。
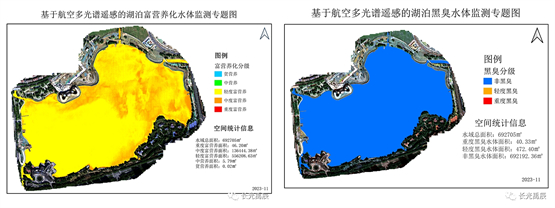
水質監測專題圖
02 大尺度河道場景
貨運航道、運河等河面較寬的大尺度河道因水域面積大、流速快、水面目標移動頻繁等情況,在保證較高空間分辨率的前提下,河道岸線與水體難以完整成圖。大尺度河道水體質量同樣是河道管理部門重點關注的信息之一。

M300 RTK+MS600 Pro+H20
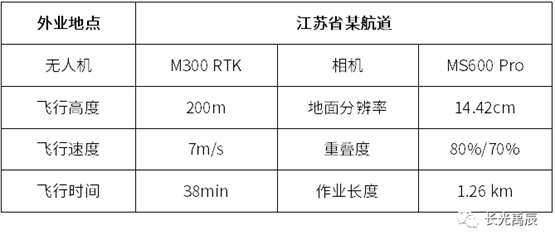
本案例選取江蘇省某通航河道作為實驗目標,水面寬度300m~450m,使用M300 RTK無人機搭載長光禹辰自主研發的6通道多光譜相機MS600 Pro,獲取了航道與兩側岸線影像,具體外業情況見下表:
使用Yusense Map軟件分步執行波段配準、二維建圖*、反射率校正,得到最終具有反射率意義的拼接影像,其中水面部分已進行DOM填充,但受水面船只頻繁運動的影響,拼接影像中會存在波浪,一定程度影響數據分析,使用Yusense Map Plus查看無波浪水體光譜特征曲線,符合水體光譜反射特征。
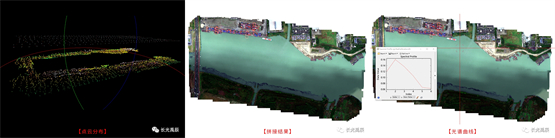
點云分布&拼接結果&光譜曲
使用Yusense Map Plus分別進行富營養化與黑臭水分析,可以看出本案例所選航道整體呈現輕度富營養化情況,主要原因是水面整體均呈現較高的反射特征,與常規水體差異明顯,且實際水色偏綠,與實際情況匹配度較高,同時無黑臭水體污染,整體表明使用DOM填充方法對光譜屬性影響較小,可以滿足水體監測需求。
水質監測專題圖
03 入海口場景
入海口是河道與海洋的交匯處,常分布著濱海濕地、河口濕地等重要自然資源,同時作為淡水與海水混合的區域,水體交換產生的污染情況也是生態環境監測的重點工作之一。水域面積大、空間分布復雜導致入海口水體質量監測難度較大。

M300 RTK+MS600 Pro+H20
本案例選取山東省某入海閘口作為實驗目標,使用M300 RTK無人機搭載長光禹辰自主研發的6通道多光譜相機MS600 Pro,獲取了內流河、入海口岸線與海面復合場景的影像,具體外業情況見下表:

使用Yusense Map軟件分步執行波段配準、二維建圖*、反射率校正,得到最終具有反射率意義的拼接影像,其中水面部分已進行DOM填充,但海面波浪明顯,拼接影像中存在較多波浪與浪花,一定程度影響數據分析,使用Yusense Map Plus查看無波浪水體光譜特征曲線,符合水體光譜反射特征。
點云分布&拼接結果&光譜曲線
使用Yusense Map Plus分別進行富營養化與黑臭水分析,可以看出本案例所選入海口中的內流河部分整體呈現中度富營養化情況,海水部分呈現輕度富營養化與中營養趨勢。其中輕度富營養化區域主要集中在入海閘口與景觀岸線附近,閘口定期開放引起內流河水體流向海洋,同時景觀岸線處底質堅固、水下高程較高,水體流速相對較慢,結合水動力分析符合富營養化空間分布規律,同時整體無黑臭水體污染,因此使用DOM填充方法對光譜屬性影響較小,可以滿足水體監測需求。
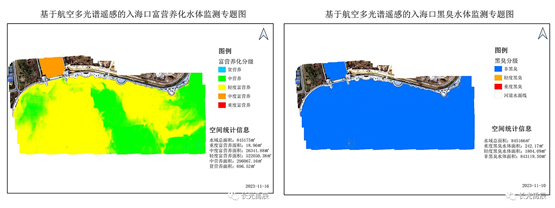
水質監測專題圖
04 海岸線場景
海岸線是研究陸-海空間關系的重要場景,陸地與海洋間物質相互作用易引起水環境變化,進而影響生態系統穩定性,尤其對于紅樹林、海島等重要生態保護區域,海岸線水體的水質監測尤為重要。

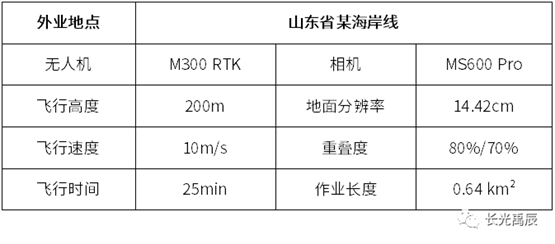
M300 RTK+MS600 Pro
本案例選取山東省某濱海岸線作為實驗目標,使用M300 RTK無人機搭載長光禹辰自主研發的6通道多光譜相機MS600 Pro,獲取了陸面與海面復合場景的影像,具體外業情況見下表:
使用Yusense Map軟件分步執行波段配準、二維建圖*、反射率校正,得到最終具有反射率意義的拼接影像,其中水面部分已進行DOM填充。此海岸線屬外海區域,海面波浪明顯,拼接影像中存在大量波浪與浪花,一定程度影響數據分析,使用Yusense Map Plus查看無波浪水體光譜特征曲線,符合水體光譜反射特征。

點云分布&拼接結果&光譜曲線
使用Yusense Map Plus分別進行富營養化與黑臭水分析,可以看出本案例所選海岸線中的水體受海浪影響明顯,產生大量耀斑,多波段均呈現較高反射特性,海水部分呈現中營養與貧營養趨勢,其中中營養區域主要集中在岸線附近,水面中因船只波浪影響產生少量中營養區域,整體符合海洋水體常態化趨勢,對于出現的少量黑臭水體區域,經分析主要是由于浪花的高反射特性引起的系統誤差,不影響整體水環境的評估結果,因此使用DOM填充方法對光譜屬性影響較小。
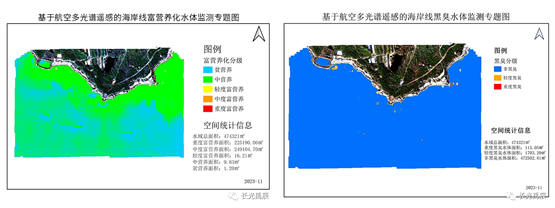
水質監測專題圖
05 案例總結
本次案例驗證了“湖泊水庫”、“大尺度河道”、“入海口”及“海岸線”4種常見的廣域水體場景,結合實例結果,基于Yusense Map實現的局部空三+DOM填充的方法可以基本滿足常規場景下的廣域水體處理與分析方法,但若遇波浪、水面耀斑、水面倒影引起的水體目標性狀變化的情況,會一定程度影響數據處理與分析準確度。
使用Yusense Map實現廣域水體拼接的功能并非流程化工具,需要進行如點云修繕、填充影像匹配、DOM編輯等輔助性操作,歡迎有相關需求的用戶聯系長光禹辰詳細溝通。
*本文所述二維建圖方法與Yusense Map常規二維建圖方法存在差異,歡迎聯系長光禹辰了解詳情。
關于長光禹辰
長光禹辰成立于2017年,是一家由中國科學院長春光機所和青島高新區聯合成立的高新技術企業,公司核心團隊來自長春光機所空間光學部,在光譜遙感、光電探測領域具有深厚的理論基礎和豐富的工程經驗,掌握完整的光譜儀器系統設計、先進的嵌入式視覺開發、復雜場景定量遙感智能調光、高精度自動輻射校正、光譜數據半定量反演及應用等核心技術,形成了以MS200、MS400、MS600、AQ300、AQ600等系列多光譜相機為代表的無人機載光譜遙感硬件產品線,提供Wifi Web、DJI Pilot等多種相機參數設置及控制方式,依托Yusense Map/Map Plus光譜數據預處理及分析軟件、Yusense Cloud端云一體化服務平臺,在農業、林業、生態、環保、警用等領域開展了深入的行業應用。公司專注于無人機航空遙感與光電探測領域,持續推出革新的軟硬件產品,落地更豐富的行業應用場景,致力于用技術和產品推動行業進步。