120Nm峰值扭矩!本末科技P1010A關節模組以高性能領跑機器人行業
本末科技正式發布新品P1010A_111準直驅機器人關節模組,可提供峰值扭矩120Nm、轉矩系數2.5Nm/A。本末科技電機研發團隊負責人郁博士向媒體透露,P1010系列一體化關節模組是公司技術團隊經過一年時間的研發和不斷優化推出的產品,能以其精準性、高扭矩輸出、高功率密度、高可靠性和低噪音等優勢,為機器人應用提供出色的性能和可靠性。

當前,行業內的機器人關節模組主要面向工業場景且多為定制化,導致產品難以統一標準。同時,市面上多數關節電機產品存在參數虛標現象,加大廠家和個人消費者選購難度。廠家在選購時需費時比較各家產品參數和詢價,而對于個人消費者,更是無法準確判斷產品是否符合自身需求以及電機品質。長此以往,對行業的健康發展帶來隱患。
本末科技對行業需求進行大量調研和分析,從核心關鍵指標、穩定性、精準性、靜音性和通用性等方面綜合考慮,針對軟硬件全面優化,并經過規模應用實際驗證后隆重推出P1010A_111準直驅機器人關節模組。產品可廣泛應用于機械狗、機械臂、人形機器人、輪足機器人、科技競賽、實驗載臺等。
·120NM超強扭矩,關鍵硬核指標
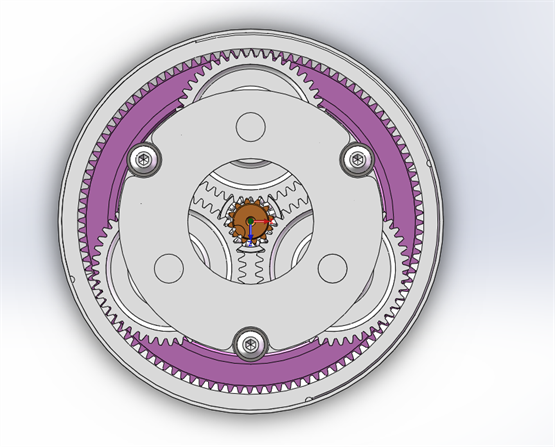
峰值扭矩、轉矩系數和減速比是描述關節電機性能的三大重要參數,其中,峰值扭矩是電機短期負載能力的重要指標,反映了電機在瞬間能夠輸出的最大扭矩;電機轉矩系數是評估電機性能的關鍵指標,反映了電機在不同負載下的轉矩輸出能力;減速比可實現電機降速增力,對于提高電機轉矩輸出能力至關重要。P1010系列電機采用的是行星減速器方案,在成本、可靠性、量產可控性方面優勢明顯,是使其快速進入產業化的優選方案。
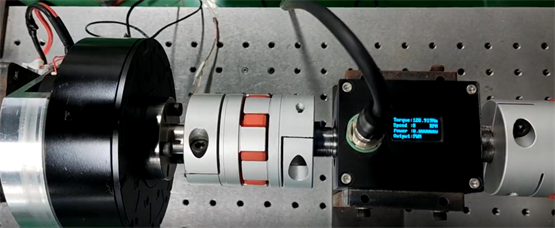
120NM峰值扭矩
P1010A_111關節電機擁有強大的爆發力和動態速度,同時120NM的峰值扭矩意味著電機的承載能力很強,也更適合負載較大或慣性較大的應用場景。特別是機器人在跳躍、跌落等場景中,P1010A_111關節電機都有優秀表現。
2.5Nm/A轉矩系數
電機轉矩系數是評估電機性能的關鍵指標,P1010A_111關節電機相對同行業內普遍為2.1Nm/A的轉矩系數,堪稱行業前沿。表明在相同電流下,P1010A_111關節電機能產生更大的力矩。
10:1減速比
高減速比意味著電機在相同轉矩輸入時,P1010A_111關節電機能產生更大的輸出力矩,應對更大負載更嚴苛的工作環境。尤其是機器人在復雜地形中進行探索、偵察、工業巡檢、監控等任務時,10:1減速比電機可以提供強大穩定的動力輸出,確保機器人在執行任務時具有高度的穩定性和可靠性。
·穩準靜全面升級
面對客戶在行業中常遇到的痛點問題,本末科技在P1010A_111關節電機研發之初,針對軟硬件設計進行了全面優化,同時,在生產制造以及可靠性測試等環節中進行不間斷的驗證,通過全方位測試,確保為客戶提供的每一款產品都是穩定、可靠的。
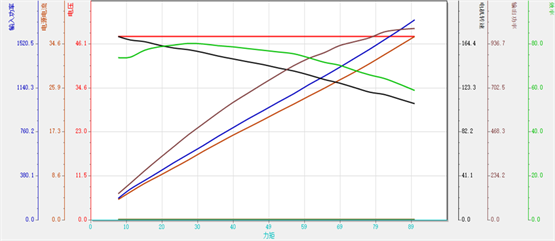
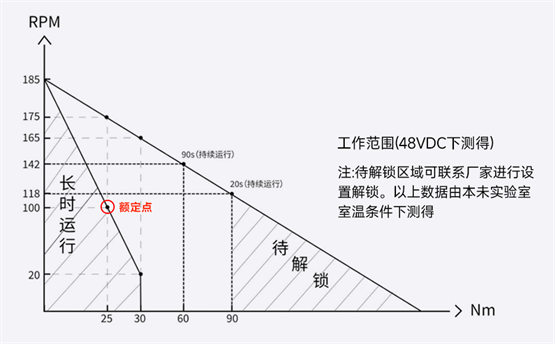
額定點實測標定,可連續工作:為了確保電機在25Nm,100rpm額定工況下能夠持續穩定運行,保障產品的可靠性和穩定性,本末科技通過電磁仿真和對整個電機系統的理論安全溫度進行評估。隨后進行實際溫升測試,對電機的核心結構和電子器件等進行溫度檢測,確保額定工作點可以穩定運行。
齒槽轉矩優化,控制絲滑:為了實現電機輸出力矩的穩定性和精準控制,以及運行時的低噪音特性,本末科技從電機本體設計入手,致力于更大程度減小齒槽效應,這種效應由鐵芯對永磁體的吸引引起,會影響力矩的平穩性。通過減小這一效應,使得電機運行更加平穩,從而實現更優秀的控制效果。
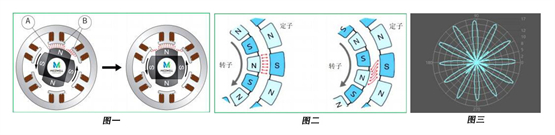
當磁體N極S極面對面時(圖一),吸引力是最大的。當電機轉子轉動時(圖二),在進行下一步移動之前,移動的磁體元件必須先從殘留的磁性中解脫出來。這種對前進移動的磁阻現象被稱為齒槽效應。
結構優化設計避免結構失效:
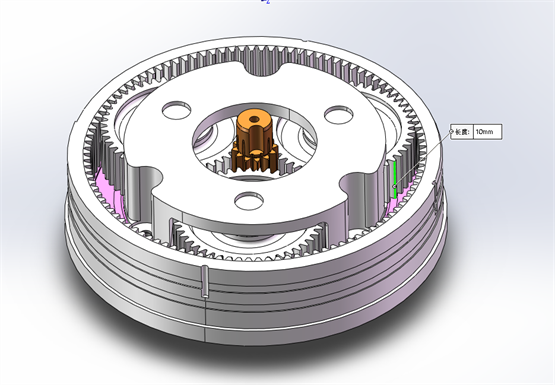
1.齒輪采用0.65大模數和10mm高的有效齒寬設計,具有更高的強度,避免出現崩齒和快速磨損問題,可以輕松應對沖擊載荷和高載荷的持續輸出的場景需求。
2.齒輪、鋼套、銷釘組合設計,避免齒輪打滑。這樣的設計將主軸受到的沖擊及大負載等工況下的壓力從鋁材轉移到鋼套與壓鑄鋁的結合力上,大幅提升了電機的結構可靠性和穩定性。
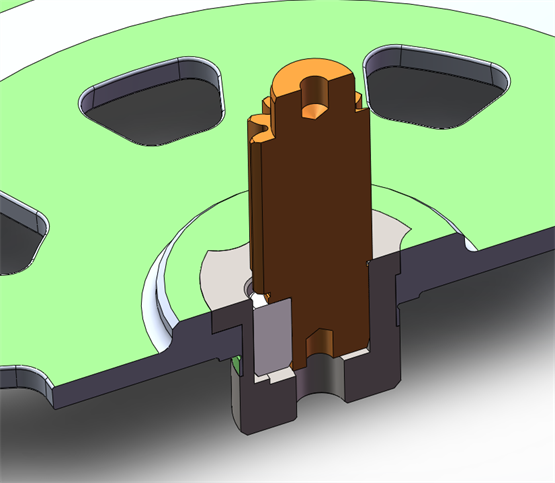
3.一體化行星架方案保證輸出關鍵部件的整體強度,并通過三個高強度螺釘緊固軸承,避免行星架因外部沖擊拉力導致脫出問題。
電機、齒輪優化設計,保證壽命:為了確保電機經久耐用,本末科技進行額定工況下的壽命測試。采用雙機對拖法或磁滯加載法,在額定電壓、額定扭矩、額定轉速下,對電機進行連續不斷的正反轉測試,并定期記錄電機性能數據,以監測性能的衰減或其他失效問題,直至達到設計壽命。
EMC\ESD:為了確保集成驅動的電機符合FCC\CE等認證標準,同時不影響客戶整機系統,本末科技在初期硬件設計階段即考慮電磁輻射和靜電抗擾等問題,并進行設計評審。最終,將產品送至第三方實驗室進行測試,以確保其符合相關標準,幫助客戶整機快速落地。
·應用驗證、場景落地
寬電壓輸入:P1010A_111關節電機可兼容18v~60v工作電壓,具備靈活的電壓兼容性,適用場景范圍更廣。無論是在安防巡檢、高校比賽,還是在工業等領域,寬電壓輸入能夠確保機器人在各種供電環境下穩定運行。

產品級:本末科技的電機產品在上市前,必須經過一系列嚴格測試和可靠性驗證,確保其性能出色穩定。P1010A_111關節電機的澎湃動力能夠讓機器人輕松實現高難度、高強度的動作。目前,已批量應用于本末科技自主研發的TITA、四足刑天等機器人產品上,并在實際應用場景中得到廣泛驗證。此外,我們也與一些行業客戶、高校和科研院所達成了合作,均得到較好的反饋。

支持兩側安裝:P1010A_111關節電機的安裝接口與出線方式經過精心設計,電機之間支持串行接線,可提高設備布局的靈活性。這一創新設計已被眾多企業廣泛借鑒與引用,并逐步成為行業的主流標準。

在當前工業4.0和智能制造的背景下,準直驅技術為機器人提供了更高效、更可靠的驅動解決方案。本末科技新推出的P1010A_111準直驅機器人關節模組,不僅在扭矩、精度和效率等核心指標上達到了行業的高標準,更在實際應用中得以驗證,滿足客戶的實際需求,成為機器人關節電機的優選動力方案。
在機器人應用領域,準直驅電機的快速響應和精確控制能力,能夠提升機器人的運動性能和操作精度、高負載能力。同時,準直驅電機能夠提供更穩定、更可靠的動力輸出,不僅有助于提高生產效率、降低能耗,其應用更將助力提升整個行業的自動化水平,從而推動行業技術進步,實現可持續及高效節能的發展。